Thad Starner, Jake Auxier, and Daniel Ashbrook
College of Computing, GVU Center
Georgia Institute of Technology
Atlanta, GA 30332-0280 USA
{thad,jauxier1,anjiro}@cc.gatech.edu
- Maribeth Gandy
Interactive Media Technology Center
Georgia Institute of Technology
Atlanta, GA 30332-0130 USA
maribeth.gandy@imtc.gatech.edu
To sense the activity in the house, efforts are being focused on creating an infrastructure of sensors and computing within the house, from floors that can identify those who walk on it [9], to RF transmitters that can provide resident location information [7], to cameras and microphones in the ceilings to recognize and track people in the house [3]. While a ubiquitous computing architecture built into the house is necessary for many applications, we are also interested in placing some of this sensing and computing power on the body. By using wearable computing on the body to interface with the technologies in the environment of the house we increase the functionality, portability, and privacy of services available to the residents. For example, the house contains an infrastructure of cameras, which are and will be used to recognize people, track their movements, and observe their activities. However, problems due to occlusion and lighting can be minimized if a camera and some computing capacity are also placed on the bodies of the residents.
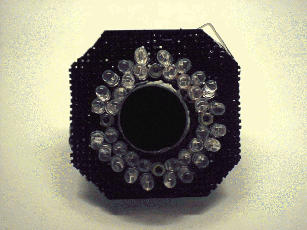
The goal of the Gesture Pendant is to allow the wearer to control elements in the house via hand gestures. Devices such as home entertainment equipment and the room lighting can be controlled with simple movements of the pendant wearer's hand.Building on previous work that used a wearable camera and computer to recognize American Sign Language (ASL) [12], we have created a system that consists of a small camera worn as a part of a necklace or pin. This camera is ringed by IR LEDs and has a IR pass filter over the lens (Figure 1.) The result is a camera that can track the user's hands, even in the dark. This is a design similar to the Toshiba ``Motion Processor'' project which uses a camera and IR LEDs as an input to a gesture recognition system for interaction with desktop and portable computers [13]. The Gesture Pendant video is analyzed and gestures are recognized. The gestures are used to trigger various home automation devices. In our current system, the user can control devices via a standard X10 network or a Nirvis Slink-E box that mimics remote controls for various consumer electronics. For example, the wearer can simply raise or lower a flattened hand to control the light level and can control the volume of the stereo by raising or lowering a pointed finger. By putting the sensing and computing on the body, this same pendant can be used to control things in the office, in the car, on the sidewalk, or at a friend's house. Privacy is also maintained since the wearer controls the video and the resulting data about their activities. The user does not have to worry about who is viewing the data and what is being done with it.
Motivation But why do we want to use hand gestures to control home automation? Home automation offers many benefits to the user, especially the elderly or disabled; however, the interfaces to these systems are poor. The most common interface to a system such as X10 is a remote control with small, difficult to push buttons and cryptic text labels that are hard to read even for a person with no loss of vision or motor skills. This interface also relies on the person having the remote control with them at all times. Portable touchscreens are emerging as a popular interface, however they have many of the same problems that remotes have, with the additional difficulty that the interface is now dynamic and harder to learn. Other interfaces include wall panels, which require the user to go to the panel's location to use the system, and phone interfaces, which still require changing location and pressing small buttons. While speech recognition has long been viewed as the ultimate interface for home automation, there are many problems in this domain. First, in a house with more than one person, a speech interface could result in a disturbing amount of noise, as all the residents would be constantly talking to the house. Also, if the resident is listening to music or watching a movie, he/she would have to speak very loudly to avoid being drowned out by the stereo or televison. This ambient noise can also cause errors in the speech recognition systems. Finally, speech is not necessarily a graceful interface. Imagine you are hosting a dinner party and you want to lower the lights in the room. If you were using a speech interface you might have to excuse yourself from the dinner conversation and then loudly state a phrase such as ``computer, lower lights to level 2.'' In this case the speech interface would be disruptive and non-ideal. However, if you had been using the gesture pendant, you could have continued your dinner conversation and simply lowered the light level to your liking by gesturing up and down with your hand.The gesture pendant can be used alone or in conjunction with various types of contextual awareness. By using various types of context the number and complexity of gestures can be reduced without reducing the number of functions that can be performed in the house. The following are some of the currently implemented and future configurations of the gesture pendant.
These various modifier technologies could be combined in any permutation to create a system that uses gesture along with sound, location, and/or orientation to control home automation. To date we have created the subsystems for configurations 1-4 and have begun experimentation in adapting our software to handle fiducials.
As an enabling technology
Obviously, all types of people can use the gesture pendant system. However, the focus of the Aware Home project is ``Aging in Place'' [8]. We feel that those who have the most to gain from the features of the Aware Home are the elderly. The technologies in the Aware Home can allow them to remain independent, living in their own homes longer. The elderly can have their health status monitored, and can have help with day-to-day tasks without losing their dignity or privacy. The features of many home automation interfaces that make them hard to use by healthy adults make them unusable by the elderly or disabled. An elderly person may suffer from Parkinson's disease, stroke, diabetes, arthritis and other ailments that can result in a reduced motor skills, reduced mobility, and/or loss of sight. Also, in an emergency, the resident might need the automation to assist them, but might be unable to speak. The gesture pendant can be used despite such impairments, enabling the resident to perform automation assisted tasks such as locking or opening/closing doors, using appliances, and accessing emergency systems.
The same interface problems are faced by those with disabilities such as cerebral palsy and multiple sclerosis. However, a study has shown that even people with extremely impaired motor skills due to cerebral palsy are able to make between 12 and 27 distinct gestures[11], which could be used as input to the gesture pendant. Therefore, we see the gesture pendant as an interface alternative that could allow people who are unable to use some of the more traditional interfaces to take advantage of the independence that home automation could afford them.
Medical Monitoring
As a user makes movements in front of the gesture pendant, the system can not only look for specific gestures, but we can also analyze how the user is moving. Therefore, a second use of the gesture pendant is as a monitoring system rather than as an input device. The parameter of movement that the pendant detects is a tremor of the hand as the user makes a gesture.
As discussed above, the target population for the gesture pendant is the elderly and disabled. Many of the diseases that this population suffers have a pathological tremor as a symptom. A pathological tremor is an involuntary, rhythmic, and roughly sinusoidal movement [2]. These tremors can appear in a patient due to disease, aging, and drug side effects; these tremors can also be a warning sign for emergencies such as insulin shock in a diabetic. Currently, we are interested in recognizing essential tremors (4-12 HZ) and Parkinsonian tremors (3-5 Hz)[2], since determination of the dominant frequency of the tremor can be helpful in early diagnosis and therapy control of such disorders [4].
The medical monitoring of tremors can serve several purposes. This data can simply be logged over days, weeks, or months for use by the doctor as a diagnostic aid. Upon detecting a tremor or a change in the tremor, the user might be reminded to take medication, or the physician or family members could be notified. Tremor sufferers who do not respond to pharmacological treatment can have a deep brain stimulator implanted in their thalamus [6]. This stimulator can help reduce or eliminate the tremors, but the patient must control the device manually. The gesture pendant data could be used to provide automatic control of the stimulator. Another area in which tremor detection would be helpful is in drug trials. The subjects involved in these studies must be closely watched for side-effects and the pendant could provide day-to-day monitoring.
The motivation behind the Gesture Pendant called for a small, lightweight wearable device. At first we considered a hat mount, but concluded that gestures would be too hard to recognize if made in front of the body, and difficult to perform if made in front of the hat. Due to the off-the-shelf nature of the components (leading to larger size and heavier weight than ideal) we decided that a pendant form was the only reasonable one. Using custom-made parts, the hardware could be shrunk considerably, and other form factors such as a brooch or, assuming sufficient miniaturization, a shirt button or clasp could be possible.
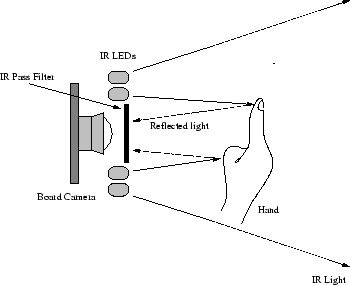
Since the goal of the Gesture Pendant was to detect and analyze gestures quickly and reliably, we decided upon an infrared illumination scheme to make color segmentation less computationally expensive. Since black and white CCD cameras pick up infrared well, we used one with a small form factor (1.3" square) and an infrared-pass filter mounted in front of it (Figure 3.) To provide the illumination, we used 36 near-infrared LEDs in a ring around the camera. The first incarnation had a lens with a roughly 90 degree field of view, but that proved to limit the gesture space too much. A wider angle lens of 160 degrees turned out to work much better, despite the fisheye effect.
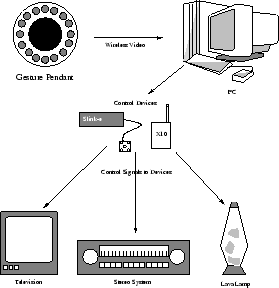
The eventual goal is to incorporate all components of the gesture pendant into one wearable device; however, for the sake of rapid prototyping we used a desktop computer to do the bulk of the image processing. This also allowed us to easily centralize the control system, by using standard peripheral home automation devices such as the Slink-E and X10. To send the video to the desktop, we used a 900 MHz video transmitter/receiver pair (Figure 2.) The transmitter is powerful enough that cordless 900 MHz phones do not interfere with it, and the receiver can be tuned to a range of channels to avoid conflicting signals from multiple pendants.
Because all of the components of the Gesture Pendant are off-the-shelf, it is currently power inefficient. The camera itself uses about 300 mW, and the LEDs can be assumed to use about 6 mW each. This, coupled with the camera's requirement for a power input of 12v, led us to use two Sony NP-F330 lithium-ion camcorder batteries in series with a step-down voltage converter. The transmitter requires 9v input, and to keep design changes simple, was just attached to a standard 9v alkaline battery. For future versions of the Pendant, we will use a single battery to power everything.
Since one of the groups that we feel this device can be of the most use to is the elderly, it is important to make it as non-obtrusive as possible. This means it must be inconspicuous, lightweight, and non-complicated. Also, since the Gesture Pendant is a wearable device, and one that is constantly in full view of others, it will be important to make it more attractive. The ring of LEDs makes it appear somewhat jewelry-like, but with a smaller form-factor and some principles of design applied to it, it will become more appealing.
Gesture Recognition
The recognition system incorporates two kinds of gestures: control gestures and user-defined gestures. Control gestures provide continuous control of a device. This type of gesture provides continuous output while the gesture is being performed. User defined gestures, recognized by hidden Markov models (HMM's) provide discrete output for the single gesture.
Data is gathered by scanning an image from the camera line by line. The algorithm used to find a blob in the image looks for a pixel with a pre-determined color. In this case, since a black and white camera is used, and the object is sufficiently illuminated, the color is a saturated white. Given an initial pixel as a seed, the algorithm grows the region by checking if any of its eight neighbors are white. This is similar to the algorithm used in Starner et al. [12]. If a region grows above a certain mass, it is considered a blob and certain statistics are computed for it. For this project, eight statistics were gathered from the blob: the eccentricity of the bounding ellipse, the angle between the major axis of this ellipse and horizontal, the length of the ellipse's major and minor axes, the distance between the blob's centroid and the center of the its bounding box, and the angle determined between horizontal and the line drawn between the centroid and the center of the bounding box. The last two features help determine if the fingers are extended on the hand and their rough orientation.
Control Gestures
Control gestures should be simple because they need to be interactive and will be used more often. User defined gestures, on the other hand, can be more complicated and powerful since they will be used less frequently.
Control gestures are those that are needed for continuous output to devices, for example, a volume control on a stereo. These are needed because gestures described by HMM's are discrete and will indicate an action, but will not let the action proceed in increments (at least in our implementation). To get a continuous control effect, the gesture would have to be done repeatedly. With a control gesture, on the other hand, the displacement of the gesture determines the magnitude of the action.
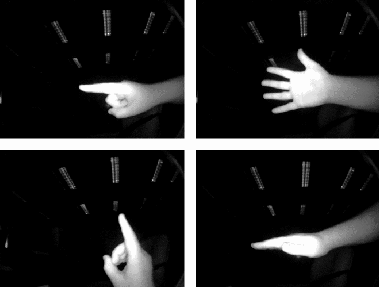
The set of features used for control gestures includes the eccentricity, major and minor axes, the distance between the blob's bounding box's centroid and the blob's centroid, and the angle of the two centroids. Eight gestures were defined for the Gesture Pendant. The gestures are determined by continual recognition of hand poses and the hand movement between frames. These hand poses consist of: ''vertical pointed finger'' (vf), ''horizontal pointed finger'' (hf), ''horizontal flat hand'' (hfh), and ''open palm'' (op). The gestures were ''horizontal pointed finger up'', ''horizontal pointed finger down'', ''vertical pointed finger left'', ''vertical pointed finger right'', ''horizontal flat hand down'', ''horizontal flat hand up'', ''open palm hand up'', and ''open palm hand down'' (Figure 5).
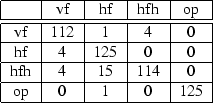
Assuming independence, random chance would result in an accuracy of 25%. The Nearest Neighbor algorithm was used for pattern recognition. The training and test sets were obtained in the same manner, and both sets were taken independently. The training set consisted of 1000 examples per hand pose for a total of 4000 examples. The test set consisted of 117 examples of vf, 129 examples of hf, 134 examples of hfh and 126 examples of oh. One-Nearest Neighbor on the test and training sets resulted in a 95% correct classification of the gestures. Figure 4 shows the confusion matrix of the hand poses.
 |
 |
User-defined Gestures
The user-defined gestures are intended to be one or two-handed discrete actions through time. Thus, a slightly different set of features are necessary. In addition to the features used for the control gestures, the blob's identity, mass, and normalized centroid coordinates are added, but calculations with the bounding box are not used.
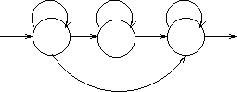
Hidden Markov models are used for recognition. The network topology
of the HMM consists of three states, where the first state can skip to
the third state (Figure
![]() ). The techniques for HMM evaluation,
estimation, and decoding are well documented in the references
[1,5,10,14].
). The techniques for HMM evaluation,
estimation, and decoding are well documented in the references
[1,5,10,14].
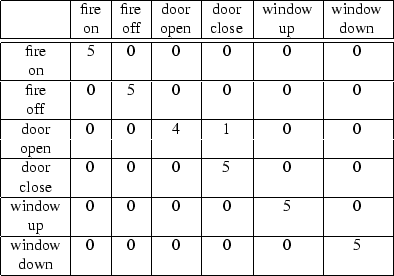
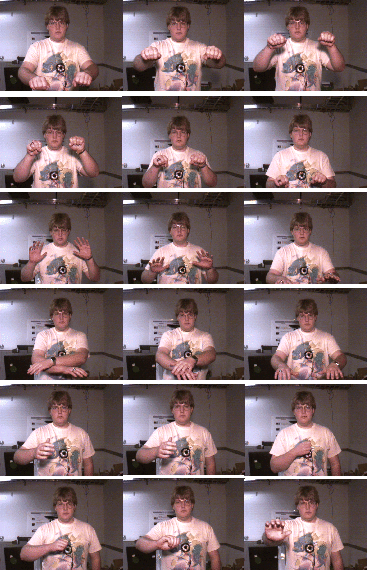
The system allows the user to define more complicated gestures; however, these must control discrete rather than continuous tasks since the gesture is defined partly by its range of motion. Six gestures were trained and tested: ''fire on'', ''fire off'', ''door open'', ''door close'', ''window up'', ''window down'' (Figure 8.) For each gesture, 15 examples were obtained using the blob tracking algorithm. Ten of the examples were randomly chosen as the training set to train the set of six HMM's. The other five examples were used for testing. We were able to achieve 96.67% accuracy with the six gestures. Figure 6 shows the confusion matrix for the user-defined gestures.
 |
Tremor Detection
The hand position data recovered by the Gesture Pendant can also be used to determine the frequency of a tremor, if present. As the user makes a gesture, a Fast Fourier Transform (FFT) is performed on the movement data obtained from the video to determine if a pathological tremor is present [4]. To test our system, we simulate tremors of various frequencies by fastening a motor to the subject's arm (Figure 9.) This motor turns an unbalanced load, resulting in the desired oscillation of the subject's arm. As the motor turns at a relatively constant speed depending on the voltage applied, we can determine if the dominant frequency as calculated by the software is accurate.
As the user performs the gesture, the centroid of the blob is recorded
to analyze for tremor detection. The position data (in the position
domain) is transformed to the frequency domain by applying the FFT to
the data. The dominant frequency is determined from identifying the
frequency with the maximum power from the power spectrum obtained.
Frequencies below 2 Hz are ignored as corresponding to the movement of
the gesture itself. The current system, can determine tremor
frequency to within ![]() .1 Hz up to 6 Hz frequencies. This data
can be logged or used for immediate diagnosis.
.1 Hz up to 6 Hz frequencies. This data
can be logged or used for immediate diagnosis.
Future Work
The current implementation of the gesture pendant uses a wireless transmitter to send the video data to a desktop PC where it is analyzed and automation commands are issued. The next step in our work is to place all of this computation onto the body in the form of a wearable computer and eliminate the need for a desktop machine.
The monitoring of tremors and motor skills could be expanded to do more complex analysis of the types of tremors in 3D. For example, Parkinson's sufferers often exhibit a complex ``pill rolling'' tremor, which we could detect and analyze. We could also determine more characteristics of the user's motor skills such as slowness of movement or rigidity that could indicate the onset of stroke or Parkinson's. We could design the gestures so that, while they would be used to control devices in the house, they would optimally reveal features of the user's manual dexterity and movement patterns.
Another, more advanced use in terms of monitoring for the pendant would be to observe more about the wearer's activities. For example the pendant could take note of when the user eats a meal or takes medication. It could keep a record of the general activity level of the wearer or notice if he/she falls down. This would further our goal of providing services for the elderly and disabled that allow them increased independence in the home.
Conclusion
We have demonstrated a wearable gesture recognition system that can be used in a variety of lighting conditions to control home automation. Through the use of a variety of contextual cues, the Gesture Pendant can disambiguate the devices under its control and limit the number of gestures necessary for control. We have shown how such a device may have enough merit to be used as a convenience by elderly residents in the Aware Home but also provides additional functionality as a medical diagnostic.
Acknowledgments
Funding for the project, in part, by the Georgia Tech Broadband Institute, the Georgia Tech Research Corporation, and the Graphics, Visualization, and Usability Center. Special thanks to Rob Melby for the blob tracking software.
This document was generated using the LaTeX2HTML translator Version 2K.1beta (1.47)
Copyright © 1993, 1994, 1995, 1996,
Nikos Drakos,
Computer Based Learning Unit, University of Leeds.
Copyright © 1997, 1998, 1999,
Ross Moore,
Mathematics Department, Macquarie University, Sydney.
The command line arguments were:
latex2html -split 0 main
The translation was initiated by bob on 2001-07-30